Inserters/zh: Difference between revisions
Changed links going to the redirect Electric_network/zh to go to Electric system/zh. |
m Sync with English version. |
||
| (37 intermediate revisions by 6 users not shown) | |||
| Line 1: | Line 1: | ||
{{languages}} | {{languages}}{{Translation verification|revisionID=217337}} | ||
{{ | ''关于常见的黄色电力机械臂,请参见{{L|Inserter}}。'' | ||
'' | |||
'''{{Translation|Inserters}}'''是用于在短距离上移动物品的一种设备。在放置后,它们的方向是固定的。{{Translation|Inserters}}能够将其后方的物品移动到前方并放置,这使得它们可以将物品从一条传送带移动到另一条传送带,也可以从机器或容器中抓取物品,或将物品置入其中。 | |||
== 机械臂类型 == | |||
{| class="wikitable" | |||
| {{Imagelink|Burner inserter}} || 仅以{{L|Fuel}}为动力的机械臂,速度最慢。 | |||
|- | |||
| {{Imagelink|Inserter}} || 标准的电力机械臂。 | |||
|- | |||
| {{Imagelink|Long-handed inserter}} || 可以在更远的距离上移动物品。 | |||
|- | |||
| {{Imagelink|Fast inserter}} || 比电力机械臂快得多。 | |||
|- | |||
| {{Imagelink|Bulk inserter}} || 和高速机械臂一样快,但可以同时移动更多物品。 | |||
|- | |||
| {{imagelink|Stack inserter|space-age=yes}} || 和集装机械臂一样快,但可以在传送带上输出物品组。 | |||
|- | |||
|} | |||
== 机制 == | |||
{{Translation|Inserters}}'''可以''': | |||
* 从地面、{{L|Transport belts}}、或任何具有存储空间的物体中(例如{{L|Chests}}、{{L|Furnace}}、{{L|Assembling machine}}或{{L|Vehicle}}等)拾取物品。 | |||
* 将物品放置在地面上、传送带上、或任何具有存储空间的物体中。 | |||
* 当供电不足时,会以较慢的速度运行。(但{{Translation|Burner inserter}}在缺乏燃料时会停止工作。) | |||
* 每次尽量拾取最大[[inserter capacity bonus (research)/zh|搬运数量]]的物品,只要不等待太长时间。 | |||
* 拾取物品并将它们投入太空或{{Translation|Lava}}中,永久性地将它们销毁。这在处理不需要的物品时很有用。 | |||
=== | {{Translation|Inserters}}'''不能''': | ||
* 拾取无法放入相邻实体的物品。 | |||
* 当相邻实体是{{L|Ghost}}时,不会拾取任何物品。 | |||
* 拾取物品以放入库存已满的实体中。(即使并非所有物品都能放入实体,{{Translation|Inserters}}也会拾取最大搬运数量的物品) | |||
* 同时将多个物品放置在同一个地格上。 | |||
* 将物品放入不能储存它们的实体,例如由于[[Stack/zh#物品组筛选|筛选]]或[[Stack/zh#限制存储容量|容量限制]]。 | |||
* 向行驶中,或自动驾驶但未停靠{{L|Train stop}}(例如在信号处等待)的列车所属的{{L|Cargo wagon}}/{{L|Locomotive}}填充货物/燃料。(此时{{Translation|Cargo wagon}}会显示关闭状态的动画) | |||
* 将{{L|Boiler}}、{{L|Nuclear reactor}}、[[:Category:Producers/zh|生产建筑]],{{L|Furnace}}和{{L|Turret}}的存储栏填满(详见下文)。 | |||
如果两台或更多{{Translation|Inserters}}从同一[[map structure/zh#格|地格]]拾取物品,能最快拾取物品的{{Translation|Inserters}}将会先拾起物品。速度更快或从传送带内侧拾取物品的{{Translation|Inserters}}在拾取时会有更高的优先级。 | |||
=== 填充限制 === | |||
根据机械臂移动物品的位置,它并不总是会填满目标的存储空间。这允许其他机械臂从同一传送带拾取物品。例如,如果一座锅炉里面有5个或更多燃料,机械臂将不会填充额外的燃料,其他燃料可以沿传送带继续向前移动。当燃料数量低于5个时,机械臂将继续填充燃料,直到5个物品的上限。 | |||
{| class="wikitable" | {| class="wikitable" | ||
! 实体 !! | ! 实体 !! 物品类型 !! 自动填充限制 | ||
|- | |||
| {{L|Boiler}}、{{L|Burner inserter}}、{{L|Furnace}}和{{L|Nuclear reactor}} || {{L|Fuel}} || align="center" | 5 | |||
|- | |- | ||
| | | {{L|Gun turret}} || 弹匣 || align="center" | 10 | ||
|- | |- | ||
| | | {{L|Artillery turret}} || {{L|Artillery shell}} || align="center" | 5 | ||
|- | |- | ||
| | | {{L|Assembling machine}}、{{L|Furnace}}、{{L|Centrifuge}}、{{L|Chemical plant}}和{{L|Oil refinery}} || 配方所需原料 || 除了用于1次制造的原料,还要加上在1次完整的机械臂搬运过程中可以完成的制造所需的原料;但至少是2次制造所需的原料,最多是100次制造所需的原料。 | ||
|- | |- | ||
| | | {{L|Lab}} || {{L|Science pack}} || 除了用于1单位研究进度的科技包,还要加上在1次完整的机械臂搬运过程中可以完成的研究进度所需的科技包;但至少是2单位研究进度所需的科技包,最多是100单位研究进度所需的科技包。 | ||
|} | |} | ||
由于机械臂的搬运数量可以通过研究{{L|Inserter capacity bonus (research)}}而超过1,因此可能由于机械臂拾取比所需数量更多的物品而导致目标库存溢出。如果使用多台机械臂向同一建筑填充物品,也可能导致库存溢出。 | |||
=== 机械臂与传送带 === | === 机械臂与传送带 === | ||
[[Transport | {{L|Transport belts}}有两条线路(即左右两侧)用于运输物品。机械臂仅把物品放置在传送带一侧。当机械臂与传送带垂直放置时,物品会放置在传送带的较远一侧,当机械臂与传送带平行放置时,物品会放置在机械臂前方的右侧。 | ||
<gallery mode="nolines" class="center" widths=300px heights=350px> | |||
File:Inserter_dropoff_locations.gif|机械臂将物品放置在传送带远测。如果传送带与机械臂的运行方向相同,则物品会被放置在传送带的右侧线路上。对于弯道传送带,机械臂总是将物品放置在传送带远测。 | |||
File:Inserter_pickup_locations.gif|当机械臂与传送带垂直放置时,机械臂会'''优先'''从传送带近侧拾取物品。如果近侧路线是空的,则机械臂会从远侧拾取物品。如果机械臂与传送带平行放置,机械臂会'''优先'''从传送带左侧线路拾取物品,如果左侧线路是空的,则机械臂会从右侧线路拾取物品。 | |||
</gallery> | |||
=== 潜在问题 === | |||
在以下情况中,机械臂可能无法拾取物品: | |||
* 从速度很快的传送带上,因为物品移动得太快。 | |||
* 从地下传送带的入口或出口(因为它们可以拾取的时间较短)。 | |||
* 从传送带弯道处,如果物品位于弯道内侧。 | |||
== 机械臂速度 == | |||
[[File:all_inserter_speeds.gif|frame|right|全部种类机械臂的速度展示。]] | |||
{| class="wikitable" | |||
! 类型 | |||
! 旋转速度(转/[[time/zh#刻|刻]])<br/>臂展速度([[map structure/zh#格|格]]/刻) | |||
! 每[[time/zh#秒|游戏秒]]</br>旋转圈数 | |||
! 旋转一圈<br/>所需秒数 | |||
! 旋转一圈<br/>所需刻数 | |||
|- align="center" | |||
| align="left"| {{Imagelink|Burner inserter}} || 0.013<br/>0.035 || ~0.7895 || ~1.267 || 76 | |||
|- align="center" | |||
| align="left"| {{Imagelink|Inserter}} || 0.014<br/>0.035 || ~0.857 || ~1.167 || 70 | |||
|- align="center" | |||
| align="left"| {{Imagelink|Long-handed inserter}} || 0.02<br/>0.05 || 1.2 || 0.833 || 50 | |||
|- align="center" | |||
| align="left"| {{Imagelink|Fast inserter}}<br/>{{Imagelink|Bulk inserter}}<br/>{{Imagelink|Stack inserter|space-age=yes}} || 0.04<br/>0.1 || 2.5 || 0.4 || 24 | |||
|} | |||
'''备注:'''每刻速度直接来源于[https://github.com/wube/factorio-data/tree/master/base/prototypes/entity 异星工厂Github数据库],其它值已在游戏中经过实际验证。误差是由于游戏运行时的取整错误导致的,因此在速度计算时,使用经验值会更加准确。 | |||
===旋转速度=== | |||
换算:2π 弧度 = 100% 圆周运动 = '''1 转'''(即完整旋转一圈)。 | |||
注: | |||
* 机械臂并不总是需要转完一圈。当从传送带上拾取物品时,从近侧线路上抓取物品会稍微快一点。 | |||
* 如果机械臂的旋转速度使其完整转完一圈所用的刻数为奇数,则该机械臂完整旋转一圈的实际刻数会被取为下一个最小的偶数。这是因为机械臂需要旋转两圈半来拾取和放置一个物品,这会消耗两倍刻数的时间,因此完整旋转一圈的刻数始终是偶数。例如:{{Translation|Fast inserter}}的旋转速度为864°/秒或0.04转/刻,即完整旋转一圈理论上需要25刻,但机械臂不能在12.5刻内旋转半圈(因为游戏内的最小时间单位为1刻),所以实际上每完整旋转一圈需要2×12=24刻。 | |||
=== 臂展速度 === | |||
臂展速度通常是不可见的(只有当与其他机械臂比较时才可见),但当从传送带的近侧或远侧拾取物品时,存在可测量的速度差异。此外,一些模组可以改变机械臂的拾取和放置位置,这使得此数据更加具有实用意义。 | |||
== 机械臂吞吐量 == | |||
=== 箱到箱 === | |||
{| class="wikitable" | |||
! rowspan=2 | 类型 | |||
! rowspan=2 | 每秒周期数 | |||
! colspan=8 | 不同[[inserter capacity bonus (research)/zh|运力加成]]等级下的运输量 | |||
|- | |||
! colspan=2 | 无加成 | |||
! colspan=2 | 2 级 | |||
! colspan=2 | 7 级 | |||
! colspan=2 | [[Transport belt capacity (research)/zh|传送带容量]] {{SA}} | |||
|- align="center" | |||
| align="left"| {{Imagelink|Burner inserter}} || {{Quality | 0.79 (76 刻) | 1.03 (58 刻) | 1.25 (48 刻) | 1.5 (40 刻) | 2 (30 刻) }} | |||
|| {{ Quality | 0.79 |1.03 |1.25|1.5 |2 }} | |||
|| (1) | |||
|| {{ Quality | 1.58 |2.07 |2.5|3 |4 }} | |||
|| (2) | |||
|| {{ Quality | 2.37 |3.10 |3.75|4.5 |6 }} | |||
|| (3) | |||
|| {{ Quality | 3.16 |4.14 |5|6 |8 }} | |||
|| (4) | |||
|- align="center" | |||
| align="left"| {{Imagelink|Inserter}} || {{Quality | 0.86 (70 刻) | 1.03 (58 刻) | 1.36 (44 刻) | 1.67 (36 刻) | 2.14 (28 刻) }} | |||
|| {{ Quality | 0.86 |1.11 |1.36|1.67 |2.14 }} | |||
|| (1) | |||
|| {{ Quality | 1.71 |2.22 |2.73|3.33 |4.29 }} | |||
|| (2) | |||
|| {{ Quality | 2.57 |3.33 |4.09|5 |6.43 }} | |||
|| (3) | |||
|| {{ Quality | 3.43 |4.44 |5.45|6.67 |8.57 }} | |||
|| (4) | |||
|- align="center" | |||
| align="left"| {{Imagelink|Long-handed inserter}} || {{Quality | 1.2 (50 刻) | 1.58 (38 刻) | 2 (30 刻) | 2.31 (26 刻) | 3.33 (18 刻) }} | |||
|| {{ Quality | 1.2 |1.58 |2|2.31 |3.33 }} | |||
|| (1) | |||
|| {{ Quality | 2.4 |3.16 |4|4.62 |6.67 }} | |||
|| (2) | |||
|| {{ Quality | 3.6 |4.74 |6|6.92 |10 }} | |||
|| (3) | |||
|| {{ Quality | 4.8 |6.32 |8|9.23 |13.33 }} | |||
|| (4) | |||
|- align="center" | |||
| align="left"| {{Imagelink|Fast inserter}} || {{Quality | 2.5 (24 刻) | 3.33 (18 刻) | 4.29 (14 刻) | 5 (12 刻) | 7.5 (8 刻) }} | |||
|| {{ Quality | 2.5 |3.33 | 4.29 | 5 | 7.5 }} | |||
|| (1) | |||
|| {{ Quality | 5 |6.67 | 8.57 | 10 | 15 }} | |||
|| (2) | |||
|| {{ Quality | 7.5 |10 |12.86|15 |22.5 }} | |||
|| (3) | |||
|| {{ Quality | 10 |13.33 |17.14|20 |30 }} | |||
|| (4) | |||
|- align="center" | |||
| align="left"| {{Imagelink|Bulk inserter}} || {{Quality | 2.5 (24 刻) | 3.33 (18 刻) | 4.29 (14 刻) | 5 (12 刻) | 7.5 (8 刻) }} | |||
|| {{ Quality | 5 |6.673 | 8.57 | 10 | 15 }} | |||
|| (2) | |||
|| {{ Quality | 10 |13.33 |17.14|20 |30 }} | |||
|| (4) | |||
|| {{ Quality | 30 |40 |51.43|60 |90 }} | |||
|| (12) | |||
|| {{ Quality | 30 |40 |51.43|60 |90 }} | |||
|| (12) | |||
|- align="center" | |||
| align="left"| {{Imagelink|Stack inserter|space-age=yes}} || {{Quality | 2.5 (24 刻) | 3.33 (18 刻) | 4.29 (14 刻) | 5 (12 刻) | 7.5 (8 刻) }} | |||
|| {{ Quality | 15 |20 | 25.71 | 30 | 45 }} | |||
|| (6) | |||
|| {{ Quality | 20 |26.67 | 34.29 | 40 | 60 }} | |||
|| (8) | |||
|| {{ Quality | 40 | 53.33 | 68.57 | 80 | 120 }} | |||
|| (16) | |||
|| {{ Quality | 40 | 53.33 | 68.57 | 80 | 120 }} | |||
|| (16) | |||
|} | |||
{| | '''备注:''' | ||
* 实验基于2.0.26版本,原始数据可在[https://docs.google.com/spreadsheets/d/1L8Td5o6TAicGi-TPwzh4lz2YiH0n7Jkpp3E8FxNpnAs/edit?usp=sharing 此文档]中查阅。机械臂可在1刻内将全部持有物品放入箱子中,因此大部分时间都花费在机械臂的转动上; | |||
* 周期数一列中括号外数据表示每秒可完成的搬运周期数(即从拾取物品到放下物品的完整过程),括号内数据表示完成一个搬运周期所需的时间(以刻计); | |||
* 运输量各列中不带括号的数据表示每秒可搬运的物品数量,带括号单列的数据表示单次可搬运的最大物品数量。 | |||
=== 箱到带 === | |||
从箱子到传送带的吞吐量取决于传送带的满载程度。如果传送带上的物品是紧密排列的(即完全压缩),机械臂就不会在传送带上放置物品——它会等待空隙出现。然而,如果空隙比物品窄,则传送带上游的物品会停下,为塞入其中的物品腾出空间。不过,传送带的方向比起机械臂而言并不重要。 | |||
测试条件为使用机械臂将物品移至空的传送带上,数据包含4个不同的[[inserter capacity bonus (research)/zh|机械臂运力加成]]等级下的运输量。 | |||
'''备注:''' | |||
* 实验数据基于2.0版本; | |||
* 各列中不带括号的数据表示每秒可搬运的物品数量,带括号单列的数据表示单次可搬运的最大物品数量。 | |||
<div style="display:inline-block; width: 100%; overflow-x: auto; vertical-align:top; margin-right:20px;"> | |||
{|class="wikitable" min-width: 100%; | |||
! rowspan="3" | 类型 | |||
! colspan="20" | 不同[[inserter capacity bonus (research)/zh|运力加成]]等级下的运输量 | |||
|- | |||
! colspan="5" | 无加成 | |||
! colspan="5" | 2 级 | |||
! colspan="5" | 7 级 | |||
! colspan="5" | [[Transport belt capacity (research)/zh|传送带容量]] {{SA}} | |||
|- | |||
! [[File:Transport belt.png|link=Transport belt/zh|32px]] || [[File:Fast transport belt.png|link=Fast transport belt/zh|32px ]] || [[File:Express transport belt.png|link=Express transport belt/zh|32px]] || [[File:Turbo transport belt.png|link=Turbo transport belt/zh|32px]] || | |||
! [[File:Transport belt.png|link=Transport belt/zh|32px]] || [[File:Fast transport belt.png|link=Fast transport belt/zh|32px ]] || [[File:Express transport belt.png|link=Express transport belt/zh|32px]] || [[File:Turbo transport belt.png|link=Turbo transport belt/zh|32px]] || | |||
! [[File:Transport belt.png|link=Transport belt/zh|32px]] || [[File:Fast transport belt.png|link=Fast transport belt/zh|32px ]] || [[File:Express transport belt.png|link=Express transport belt/zh|32px]] || [[File:Turbo transport belt.png|link=Turbo transport belt/zh|32px]] || | |||
! [[File:Transport belt.png|link=Transport belt/zh|32px]] || [[File:Fast transport belt.png|link=Fast transport belt/zh|32px ]] || [[File:Express transport belt.png|link=Express transport belt/zh|32px]] || [[File:Turbo transport belt.png|link=Turbo transport belt/zh|32px]] || | |||
|- | |||
| align="left"| {{Imagelink|Burner inserter}} | |||
|| {{ Quality | 0.78 | 1.03 | 1.25 | 1.5 | 2 }} | |||
|| {{ Quality | 0.78 | 1.03 | 1.25 | 1.5 | 2 }} | |||
|| {{ Quality | 0.78 | 1.03 | 1.25 | 1.5 | 2 }} | |||
|| {{ Quality | 0.78 | 1.03 | 1.25 | 1.5 | 2 }} | |||
|| (1) | |||
|| {{ Quality | 1.57 | 2.03 | 2.43 | 2.93 | 3.87 }} | |||
|| {{ Quality | 1.57 | 2.03 | 2.43 | 2.93 | 3.87 }} | |||
|| {{ Quality | 1.57 | 2.03 | 2.43 | 2.93 | 3.87 }} | |||
|| {{ Quality | 1.57 | 2.03 | 2.43 | 2.93 | 3.87 }} | |||
|| (2) | |||
|| {{ Quality | 2.15 | 2.72 | 3.2 | 3.75 | 4.75 }} | |||
|| {{ Quality | 2.25 | 2.9 | 3.45 | 4.1 | 5.3 }} | |||
|| {{ Quality | 2.3 | 3 | 3.6 | 4.3 | 5.6 }} | |||
|| {{ Quality | 2.3 | 3 | 3.6 | 4.3 | 5.6 }} | |||
|| (3) | |||
|| {{ Quality | 2.6 | 3.27 | 3.73 | 4.27 | 5.2 }} | |||
|| {{ Quality | 2.87 | 3.65 | 4.27 | 5 | 6.33 }} | |||
|| {{ Quality | 2.93 | 3.8 | 4.53 | 5.33 | 6.87 }} | |||
|| {{ Quality | 3 | 3.87 | 4.6 | 5.47 | 7.07 }} | |||
|| (4) | |||
|- | |||
| align="left"| {{Imagelink|Inserter}} | |||
|| {{ Quality | 0.85 | 1.12 | 1.37 | 1.67 | 2.13 }} | |||
|| {{ Quality | 0.85 | 1.12 | 1.37 | 1.67 | 2.13 }} | |||
|| {{ Quality | 0.85 | 1.12 | 1.37 | 1.67 | 2.13 }} | |||
|| {{ Quality | 0.85 | 1.12 | 1.37 | 1.67 | 2.13 }} | |||
|| (1) | |||
|| {{ Quality | 1.7 | 2.17 | 2.67 | 3.23 | 4.13 }} | |||
|| {{ Quality | 1.7 | 2.17 | 2.67 | 3.23 | 4.13 }} | |||
|| {{ Quality | 1.7 | 2.17 | 2.67 | 3.23 | 4.13 }} | |||
|| {{ Quality | 1.7 | 2.17 | 2.67 | 3.23 | 4.13 }} | |||
|| (2) | |||
|| {{ Quality | 2.3 | 2.9 | 3.45 | 4.1 | 5 }} | |||
|| {{ Quality | 2.45 | 3.1 | 3.75 | 4.5 | 5.6 }} | |||
|| {{ Quality | 2.5 | 3.2 | 3.9 | 4.75 | 6 }} | |||
|| {{ Quality | 2.5 | 3.2 | 3.9 | 4.75 | 6 }} | |||
|| (3) | |||
|| {{ Quality | 2.8 | 3.43 | 4 | 4.6 | 5.47 }} | |||
|| {{ Quality | 3.07 | 3.87 | 4.6 | 5.47 | 6.67 }} | |||
|| {{ Quality | 3.2 | 4.07 | 4.87 | 5.87 | 7.27 }} | |||
|| {{ Quality | 3.27 | 4.13 | 5 | 6 | 7.48 }} | |||
|| (4) | |||
|- | |||
| align="left"| {{Imagelink|Long-handed inserter}} | |||
|| {{ Quality | 1.2 | 1.58 | 2 | 2.3 | 3.33 }} | |||
|| {{ Quality | 1.2 | 1.58 | 2 | 2.3 | 3.33 }} | |||
|| {{ Quality | 1.2 | 1.58 | 2 | 2.3 | 3.33 }} | |||
|| {{ Quality | 1.2 | 1.58 | 2 | 2.3 | 3.33 }} | |||
|| (1) | |||
|| {{ Quality | 2.33 | 3 | 3.87 | 4.43 | 6.3 }} | |||
|| {{ Quality | 2.33 | 3 | 3.87 | 4.43 | 6.3 }} | |||
|| {{ Quality | 2.33 | 3 | 3.87 | 4.43 | 6.3 }} | |||
|| {{ Quality | 2.33 | 3 | 3.87 | 4.43 | 6.3 }} | |||
|| (2) | |||
|| {{ Quality | 3.1 | 3.9 | 4.75 | 5.3 | 6.92 }} | |||
|| {{ Quality | 3.35 | 4.3 | 5.3 | 6 | 8.18 }} | |||
|| {{ Quality | 3.45 | 4.5 | 5.6 | 6.4 | 9 }} | |||
|| {{ Quality | 3.45 | 4.5 | 5.6 | 6.4 | 9 }} | |||
|| (3) | |||
|| {{ Quality | 3.65 | 4.45 | 5.20 | 5.72 | 7.07 }} | |||
|| {{ Quality | 4.13 | 5.2 | 6.33 | 7.07 | 9.23 }} | |||
|| {{ Quality | 4.33 | 5.6 | 6.87 | 7.73 | 10.43 }} | |||
|| {{ Quality | 4.47 | 5.73 | 7.07 | 8 | 10.92 }} | |||
|| (4) | |||
|- | |||
| align="left"| {{Imagelink|Fast inserter}} | |||
|| {{ Quality | 2.5 | 3.33 | 4.28 | 5 | 7.5 }} | |||
|| {{ Quality | 2.5 | 3.33 | 4.28 | 5 | 7.5 }} | |||
|| {{ Quality | 2.5 | 3.33 | 4.28 | 5 | 7.5 }} | |||
|| {{ Quality | 2.5 | 3.33 | 4.28 | 5 | 7.5 }} | |||
|| (1) | |||
|| {{ Quality | 4.8 | 6.3 | 7.5 | 7.5 | 7.52 }} | |||
|| {{ Quality | 4.8 | 6.3 | 8 | 9.23 | 13.33 }} | |||
|| {{ Quality | 4.8 | 6.3 | 8 | 9.23 | 13.33 }} | |||
|| {{ Quality | 4.8 | 6.3 | 8 | 9.23 | 13.33 }} | |||
|| (2) | |||
|| {{ Quality | 5.62 | 6.92 | 7.5 | 7.5 | 7.52 }} | |||
|| {{ Quality | 6.42 | 8.18 | 10 | 11.25 | 15 }} | |||
|| {{ Quality | 6.9 | 9 | 11.25 | 12.85 | 18 }} | |||
|| {{ Quality | 6.9 | 9 | 11.25 | 12.85 | 18 }} | |||
|| (3) | |||
|| {{ Quality | 6 | 7.07 | 7.5 | 7.52 | 7.52 }} | |||
|| {{ Quality | 7.5 | 9.23 | 10.92 | 12 | 15 }} | |||
|| {{ Quality | 8.27 | 10.43 | 12.62 | 14.13 | 18.47 }} | |||
|| {{ Quality | 8.58 | 10.92 | 13.33 | 15 | 20 }} | |||
|| (4) | |||
|- | |- | ||
| | | align="left"| {{Imagelink|Bulk inserter}} | ||
| | || {{ Quality | 4.8 | 6.3 | 7.5 | 7.5 | 7.52 }} | ||
| | || {{ Quality | 4.8 | 6.3 | 8 | 9.23 | 13.33 }} | ||
|| {{ Quality | 4.8 | 6.3 | 8 | 9.23 | 13.33 }} | |||
|| {{ Quality | 4.8 | 6.3 | 8 | 9.23 | 13.33 }} | |||
|| (2) | |||
|| {{ Quality | 6 | 7.07 | 7.5 | 7.52 | 7.52 }} | |||
|| {{ Quality | 7.5 | 9.23 | 10.92 | 12 | 15 }} | |||
|| {{ Quality | 8.27 | 10.43 | 12.62 | 14.13 | 18.47 }} | |||
|| {{ Quality | 8.58 | 10.92 | 13.33 | 15 | 20 }} | |||
|| (4) | |||
|| {{ Quality | 6.93 | 7.35 | 7.5 | 7.52 | 7.52 }} | |||
|| {{ Quality | 11.23 | 12.4 | 13.33 | 13.85 | 15 }} | |||
|| {{ Quality | 14.4 | 16.38 | 18 | 18.95 | 21.18 }} | |||
|| {{ Quality | 16.4 | 18.97 | 21.2 | 22.5 | 25.72 }} | |||
|| (12) | |||
|| {{ Quality | 6.93 | 7.35 | 7.5 | 7.52 | 7.52 }} | |||
|| {{ Quality | 11.12 | 12.4 | 13.33 | 13.85 | 15 }} | |||
|| {{ Quality | 14.4 | 16.38 | 18 | 18.95 | 21.18 }} | |||
|| {{ Quality | 16.4 | 18.97 | 21.2 | 22.5 | 25.72 }} | |||
|| (12) | |||
|- | |- | ||
| | | align="left"| {{Imagelink|Stack inserter|space-age=yes}} | ||
| | || {{ Quality | 11.27 | 13.87 | 15 | 15 | 15.03 }} | ||
|| {{ Quality | 12.87 | 16.37 | 20 | 22.5 | 30 }} | |||
|| {{ Quality | 13.8 | 18 | 22.5 | 25.7 | 36 }} | |||
|| {{ Quality | 13.8 | 18 | 22.5 | 25.7 | 36 }} | |||
|| (6) | |||
|| {{ Quality | 12 | 14.13 | 15 | 15.03 | 15.03 }} | |||
|| {{ Quality | 15 | 18.47 | 21.83 | 24 | 30 }} | |||
|| {{ Quality | 16.53 | 20.87 | 25.23 | 28.27 | 36.93 }} | |||
|| {{ Quality | 17.17 | 21.83 | 26.67 | 30 | 40 }} | |||
|| (8) | |||
|| {{ Quality | 13.33 | 14.57 | 15 | 15.03 | 15.03 }} | |||
|| {{ Quality | 20 | 22.87 | 25.27 | 26.67 | 30 }} | |||
|| {{ Quality | 24 | 28.27 | 32 | 34.3 | 40 }} | |||
|| {{ Quality | 26.67 | 32 | 36.9 | 40 | 48 }} | |||
|| (16) | |||
|| {{ Quality | 24 | 28.27 | 30 | 30.07 | 30.07 }} | |||
|| {{ Quality | 30 | 36.93 | 43.67 | 48 | 60 }} | |||
|| {{ Quality | 33.07 | 41.73 | 50.47 | 56.53 | 73.87 }} | |||
|| {{ Quality | 34.33 | 43.67 | 53.33 | 60 | 80 }} | |||
|| (16) | |||
|} | |} | ||
</div> | |||
=== 箱到分流器 === | |||
当机械臂将物品垂直送入分流器的一侧,它总是被视为置于分流器的输入端,这使得分流器能将一半数量的物品移动到另一条传送带(假设分流器的筛选/优先设置允许,且两条传送带上都有可用空间),从而使机械臂能更快地搬运物品。机械臂运力加成等级为 7 的{{Translation|Bulk inserter}}可以16.0 件/秒的速度传输物品,而不是通常的 14.4 件/秒。 | |||
<gallery mode="nolines" class="center" widths=400px heights=250px> | |||
File:Inserter to splitter comparison.gif|通过放置到分流器的一侧,升满科技的{{Translation|Bulk inserter}}可以填充极速传送带的 71%,而不是通常的 64%。(动图基于1.1版本) | |||
File:Inserter belt saturation.gif|1.1 版本中,如果将其中一台接入分流器,三台{{Translation|Bulk inserter}}即可填满一条极速传送带。2.0 版本中,如果其中两台接入分流器,三台{{Translation|Bulk inserter}}即可填满一条极速传送带。(动图基于1.1版本) | |||
</gallery> | |||
===带到箱(垂直)=== | |||
'''备注:'''以下内容基于[https://docs.google.com/spreadsheets/d/1Q4hxL69qrK3qeEKU8aDkuwM3gJy6I2dJ4FYSs-FQUpI/edit?usp=sharing 1.1]版本的实验数据。1.1版本的大部分实验数据都是下面的信号网络蓝图采集的,用于测量机械臂转动过程之间的精确时间差。本页上的大部分数据(特别是带到箱的数据)在很大程度上依赖于进行测量所设置的条件。如果读者的设置与本页中的测试不同,可以使用以下蓝图自行进行测量。 | |||
{{BlueprintString|bp-string=0eNrtXF1v4kYU/SuRq75UkMz32GhbKY996FvfuivkwBCsBYNss20U8d87NiHAwMVzHdjsKKtIURzb1zPn3K85Y3iOHmYrsyyyvIoGz9HYlKMiW1bZIo8G0V8mLVeFKW+yvDRFZYqbalosVo/T5aq6WeVj+49xNpmYwuTVzWiRj7P6xvL2c/45n1bVshzc3f2bfc1uJ+moWhTZ4na0mN/9+WKs/GX71/DvV7Of86gXZdZWGQ3+eY7K7DFPZ/XIqqelsUPKKjO3V+TpvD4qq3T0tb8dXbS2t9pR/RcN6LrXenNaZNV0bqps1LfDesjy1I5xzwZbf+lFdmZ2UmYzmubgaZiv5g/2aQPaYqoXLRdltsHyObIW+/pW9qIn+we3jxlnhRltzopeZKdcFYvZ8MFM02+ZvdvesjM73KFbn5hkRVkNj+b3LSuqlf3PDp/miv59PavS1DZqQxa1mm1KetFiaYr0he07e99iVVkSUJbX62bw+WYuzfBo/asw433QMnvE7ZVZMVplVXNI11/svQy4mEp7el3z6MDO0LCr94HdpKPpHvI4uvaZ+fSpAzWbpyPYkUfs9KLHwpi8hUa2o/Hk5VQBRHI0kfJHjp9frx4/1GWod3Ca8RYm2HH8neJFoHnhHzuvKUxea1g6BbtEw85+5jUPdtj5qNFgnlO4PMcEQKxCE0s/dp4T5xnjtIUJ6Zfn9Osot5M9zwrZsmLjbn2aiUk2qzvb070rBA6JGmurGuw+JVonXFEWtzSzkDV6YI3HgjLC2V5XizHGDowlhBCaaLqzxlHW+J41O0+uBY2ZeDUmUMbEwdCojmWSiD1rEmVNHnKQCE05FztrCmVN7VljVHAWJ/vGNMqYPhialDROmIjJq7UYZS0+sKY4lbFgUr1aS1DWkgNrzP5IHu9ZowRl7v7kVHfWNoHftZ89zCKJX5KIscmbfOxeiFJMM8Qh2BMs7PRnL+TBDtzsuLy1dTucAczVLvcyyrEZZWNTnOVNvLDWlNQ93tRp3l5Mvo20NH+qpln+uMk221gh9cF8mRbNQAfRHx0IqSFvjC6fhk0eG06KxXyY5dZKNJiks9JAbJ1mhZ/XSNgRaRC9nms/iha12MfuVeOWXjVpiSPPMkTRqpfY71XbA+tSvLxEwBEzfXrIzG9dowsXPwTMaqfC6ehqh0zlSRaHFOojlnT7mmL7xPlibIaLyXAPxT0lrjDpeDhNN5hXdkAWmapYmd0VzcnmstpS46rdgQSnvhOPynk6m/Vn6Xx5Yi0Vb+dNt/P2G4cg0IN38sncjLPVvG9m1mJho2S5mJlzQyDgENo1uKYK2ieb7HH6sFg1Sz/Ge5x+OTVG5QeOPgIHdIrXWO0QquR8/fsUoUKNnY8dGkPEaT9Q1PcBhV4UFJpAs46RrkCuOmt22Vkrh3wBNosJkvzrwsAvC4N2YYCkX0b8YJBBJgaIfEb9Zi261goNPZgh4b6u14nLwk1cr4P23xjHlkzRqWTy8y2yaK+otrjz5FRFZZ7tBg8xcOT5ispAXqUfKCzEisrAoFZIVwipojLhkC+hPphpJPkhVVQmXRigdQjz7K9oiImBg+R7tlOkY0WV0Ds5nCDhDqqixq7XQTu9nGIrKulUUdX5ihq/oaJyv96IhBg3SYu8A9LKvTChIdZTDoa0wDlCSOWUu9RLSJ3gEkd9SNWUcxcFSK3gqsueDv2eezqvOy8/yHaO327N2a0B5blnw/1aPhZkqwMGZoybdEgNB3eFIwUJRzxBNhy8m+jd8uap1m9QxQXBbRkQXM9K3aWTAN97pbiB4LcuHFahBbxgOHH4ur4tLyuKus20gLouwXHa8HVRUJfeF3BQgNowIXC+cN3kri+KgnDbMAWJO0LifIEG1IYJtw1TUM0TCqdbh5QXmOsLAkRB47YNkPWCHenTUFcsYhwd13XK+LJO6W7hKRCFBEcHfhPH6TUg8UsSnAAcVHS4dEhoU01SnP4bUtVkri9I8LM0DOcLIVVN6faRGmpoJcf5QkhVUx6tQcCIEDhtOqS8wF1fkNCaQkrc1gC2aroNrYRaOalwdIRUNaW71tRggtI4OvAbNc5AoFWWjFEyb1DB4bKhwNYhQam8IdVM7nqCgqqFIihPCKpkuqKDhpbbiqI8IaiK6aZoDdUKxTrI/cRV+9n3VPv5ETaXVvvrl6lxkafObzcqhnk3XQnfr2fw3TZQHKWgB5X53XhXYLyLDq5O39XVXWx+7/YZl4tta6mWN7/dzYG2T2+fuv4kdRLlvyH1kcqVBDUkhimF27NgSPUFBF/jZGl2VfSTy2pfwleQVTFOlr4uCveXRUEei/OekqBKcMIoC6i0iNjXOTTBCaPY0ITQ1xSnfYUUmpL5qj6a4bSvkEJT8mMF0FN30BynvoQUmlJ5O4fAqS/I0AS1Ly1RS+yQIlMR39WlVqgldkiBqeixzuDZyGndYSHC3nUhwi6w5r7vuOJ+2wpZ4FYs51fm9Uf8e29bymjcy2whJWUlT+cFC1nzdayDvS+g7UWz9MHYMUbbb4a9eUxXj/VrbN9MUW48PKZCJ0xLQbkkcr3+HxANddo=}} | |||
当从传送带上拾取物品时,除了传送带的填充程度之外,还有很多其它因素起作用: | |||
* 物品移动的速度(即它们是否在传送带上排队或以传送带速度移动)。 | |||
* 传送带是否垂直于机械臂或迎面放置。 | |||
* 物品是否在垂直传送带的近或远侧线路上。 | |||
* 传送带是否转弯,以及物品在弯道的内侧还是外侧。 | |||
* 是否是地下传送带的入口或出口。这缩短了机械臂拾取物品需要的时间。 | |||
* 机械臂和传送带上的物品间的各种复杂的时机因素,因为游戏模拟了机械臂对每个物品的锁定。 | |||
下面使用的测试设置是一台机械臂从垂直传送带上拾取物品,且物品仅在传送带的远端线路上。传送带完全压缩,计时既适用于全速移动的物品,也适用于正在尽量排队等待的物品。数据为三种不同的[[inserter capacity bonus (research)/zh|机械臂运力加成]]等级下的运输数量。 | |||
{| class="wikitable" | {| class="wikitable" | ||
! | ! rowspan=4 | 类型 | ||
! | ! colspan=15 | 不同[[inserter capacity bonus (research)/zh|运力加成]]等级下的运输量 | ||
! | |- | ||
! | ! colspan=5 | 无加成 | ||
! colspan=5 | 2 级 | |||
! colspan=5 | 7 级 | |||
|- | |||
! colspan=3 | 移动中物品 | |||
! rowspan=2 | 排队中物品 | |||
! rowspan=2 | | |||
! colspan=3 | 移动中物品 | |||
! rowspan=2 | 排队中物品 | |||
! rowspan=2 | | |||
! colspan=3 | 移动中物品 | |||
! rowspan=2 | 排队中物品 | |||
! rowspan=2 | | |||
|- | |||
! [[File:Transport belt.png|link=Transport belt/zh|32px]] || [[File:Fast transport belt.png|link=Fast transport belt/zh|32px]] || [[File:Express transport belt.png|link=Express transport belt/zh|32px]] | |||
! [[File:Transport belt.png|link=Transport belt/zh|32px]] || [[File:Fast transport belt.png|link=Fast transport belt/zh|32px]] || [[File:Express transport belt.png|link=Express transport belt/zh|32px]] | |||
! [[File:Transport belt.png|link=Transport belt/zh|32px]] || [[File:Fast transport belt.png|link=Fast transport belt/zh|32px]] || [[File:Express transport belt.png|link=Express transport belt/zh|32px]] | |||
|- align="center" | |- align="center" | ||
| {{ | | align="left"| {{Imagelink|Burner inserter}} || 0.60 || '''0.65''' || 0.50 || 0.64 || (1) || 1.11 || '''1.20''' || 1.13 || 1.26 || (2) || 1.61 || 1.61 || '''1.65''' || 1.71 /<br/>1.73 /<br/>1.86 * || (3) | ||
|- align="center" | |- align="center" | ||
| {{ | | align="left"| {{Imagelink|Inserter}} || '''0.94''' || '''0.94''' || '''0.94''' || 0.88 || (1) || '''1.67''' || '''1.67''' || 1.50 || 1.74 || (2) || '''2.50''' || 2.25 || 2.33 || 2.37 /<br/>2.37 /<br/>2.54 * || (3) | ||
|- align="center" | |- align="center" | ||
| {{ | | align="left"| {{Imagelink|Long-handed inserter}} || 1.18 || 1.18 || '''1.25''' || 1.20 || (1) || 2.20 || 2.31 || '''2.40''' || 2.40 || (2) || 3.21 || 3.21 || '''3.46''' || 3.40 || (3) | ||
|- align="center" | |- align="center" | ||
| {{ | | align="left"| {{Imagelink|Fast inserter}} || '''2.50''' || 2.31 || '''2.50''' || 2.50 || (1) || 4.50 || 4.29 || '''5.00''' || 4.80 || (2) || '''6.43''' || 6.00 || '''6.43''' || 6.43 || (3) | ||
|- align="center" | |- align="center" | ||
| {{ | | align="left"| {{Imagelink|Bulk inserter}} || 4.50 || 4.29 || '''5.00''' || 4.80 || (2) || 7.50 || 7.50 || '''8.00''' || 7.50 /<br/>8.57 /<br/>8.28 * || (4) || 7.50 || 11.25 || '''15.00''' || 7.50 /<br/>13.09 /<br/>15.32 * || (12) | ||
|} | |||
'''备注:''' | |||
* 带<nowiki>*</nowiki>的三个数据分别对应基础/高速/极速传送带的运量; | |||
* “移动中物品”表示物品正常随传送带移动,“排队中物品”表示物品在传送带上停止,等待前方物品移动; | |||
* 不带括号的数据表示每秒可搬运的物品数量,带括号单列的数据表示每次可搬运的最大物品数量。 | |||
由于涉及更多因素,这些测量比箱到带模式更加复杂。 | |||
* 粗体字的单元格显示了在每个加成等级下,每种传送带对应于每种机械臂的最高吞吐量。更快的传送带速度意味着机械臂需要更努力地拾取快速移动的物品。这种效果在较慢的机械臂和较小的搬运数量下更加明显。 | |||
* 当物品排队时,传送带类型基本上无关紧要,因此这种情况只给出一列数据。例外的是{{Translation|Bulk inserter}}——对于{{Translation|Transport belt}}设置了4以上的运力限制,此外高速和极速传送带间的差异也是显著的。 | |||
=== 带到箱(面对机械臂) === | |||
'''备注:''' 实验数据基于1.1版本。 | |||
当从面对机械臂的传送带上拾取物品时,不同设置之间存在多个细微差异。下列吞吐量测试使用{{L|Express transport belt}}和{{L|Bulk inserter}},且将{{L|Inserter capacity bonus (research)}}升级到最高等级。下图中的每个设置显示机械臂每转消耗的时间(刻)和机械臂每秒移动的物品数量(个)。这些测量在所有测试方向上都是一致的。 | |||
图中:t/c = 刻/转,i/s = 个/秒 | |||
[[File:Inserter_belt_to_chest_throughput.png|center|900px]] | |||
=== 到{{Translation|Lava}}/{{Translation|Space}} === | |||
在{{L|Space Age}}中,{{Translation|Inserters}}可将物品移动到{{L|Vulcanus}}的{{Translation|Lava}}中,或{{L|Space platform}}上的{{Translation|Space}}中。然而,这种操作的速度并不像移入容器(如箱子)那样快。 | |||
当物品移动到{{Translation|Lava}}/{{Translation|Space}}时,每刻会从{{Translation|Inserters}}持有的物品中移除一个。因此,一个持有16个物品的{{L|Stack inserter}}需要16刻才能将其持有的物品全部移动到{{Translation|Lava}}/{{Translation|Space}}。相比之下,在移入容器时,{{Translation|Inserters}}持有的全部物品会在1刻内被移入容器中。 | |||
== 能量消耗 == | |||
{{Translation|Inserters}}的功耗由多个因素决定。 | |||
首先,像大多数机器一样,所有{{Translation|Inserters}}(除了{{Translation|Burner inserter}}以外)都有待机功耗,这是一个固定功耗。只要机械臂接入电网,无论是否工作,都会持续消耗电能。 | |||
{{Translation|Inserters}}也有与运动相关的两种功耗。这些功耗分别用于旋转运动和伸长/收缩运动(即臂展运动),且会累积。 | |||
最后,{{Translation|Inserters}}在拾取和放下物品时会表现出功率峰值,可以称为“物品峰值”,因为这通常会在{{Translation|Inserters}}与物品交互后直接观察到。这是因为在拾取/放下物品后,{{Translation|Inserters}}会开始伸长/收缩0.2单位(此距离由[https://github.com/wube/factorio-data/blob/master/base/prototypes/entity/entities.lua Lua源代码]给出)。由于游戏中与线性运动相关的功耗比旋转运动高得多,此时{{Translation|Inserters}}的能耗会急剧增加。 | |||
[[File:Yellow Inserter Power Spikes.png|thumb|{{Translation|Inserter}}的电力消耗图表。]] | |||
从电力消耗图表可见,在线性运动期间,{{Translation|Inserter}}的电力消耗是显著增加的。 | |||
{{Translation|Burner inserter}}虽然不使用电力,但它们与其它{{Translation|Inserters}}具有相同的能量消耗特性(除了待机功耗)。在获得燃料时,它们会补充自身的热能储备(类似于某种内部电池),并以与其它{{Translation|Inserters}}使用电网电力的相同方式使用热能,包括物品峰值。除了待机功耗外,{{Translation|Burner inserter}}的功能与其它{{Translation|Inserters}}相同,但拆除{{Translation|Burner inserter}}会导致其内部能量储备清零。 | |||
=== 能量消耗 === | |||
[[File:Inserter Testing Setup.png|thumb|机械臂测试设置。]] | |||
需要注意的是,由于取整误差,在进行计算时不能直接使用游戏提供的数据,必须结合理论和经验方法来确保准确性。更多信息可以查看这篇[https://forums.factorio.com/viewtopic.php?t=128389 论坛主题]。 | |||
游戏根据{{Translation|Inserters}}的硬编码修正系数计算其实际功率: | |||
'''{{Translation|Inserters}}功率修正(千焦)''' | |||
这些数值是从[https://github.com/wube/factorio-data/blob/master/base/prototypes/entity/entities.lua 源代码]中衍生而来。 | |||
{| class="wikitable" | |||
|- | |||
! 热能 !! 电力!! 加长!! 高速 !! 集装 !! 堆叠 | |||
|- | |||
| 50 || 5 || 5 || 7 || 20 || 40 | |||
|- | |- | ||
|} | |} | ||
游戏使用这些数值的方式是取以刻为单位的游戏运行速度(详见上文),然后代入以下公式来推导功率: | |||
<code>速度 × 功率修正系数 × 每秒刻数</code> | |||
应用该公式可以推导出以下数值: | |||
'''旋转运动的功耗(千瓦)''' | |||
{| class="wikitable" | {| class="wikitable" | ||
|- | |- | ||
! 热能 !! 电力!! 加长!! 高速 !! 集装 !! 堆叠 | |||
|- | |- | ||
| | | 39 || 4.2 || 6 || 16.8 || 48 || 96 | ||
|- | |- | ||
| { | |} | ||
'''线性运动的功耗(千瓦)''' | |||
{| class="wikitable" | |||
|- | |||
! 热能 !! 电力!! 加长!! 高速 !! 集装 !! 堆叠 | |||
|- | |- | ||
| | | 105 || 10.5 || 15 || 42 || 120 || 240 | ||
| | |||
| | |||
|- | |- | ||
|} | |} | ||
== | 将上述两个值相加,再加上待机功耗,即可得到最大功率值。需要注意的是,虽然能量消耗的持续时间会受到游戏中取整误差的影响,比如每次旋转的时间等,但实际功率不会受到这些误差的影响。{{Translation|Inserters}}的旋转速度略快于游戏代码并不意味着其功率也会略微升高,它仍然维持相同的功率。 | ||
旋转功耗{{Translation|Inserters}}旋转的整个期间都会存在,但臂展功耗仅在与物品交互时短暂出现,导致物品峰值的出现。通过计算两者的持续时间,读者可以精确地计算初在任何给定情况下{{Translation|Inserters}}使用多少焦耳的能量。与旋转速度一样,物品峰值的持续时间也受到游戏取整误差的影响。可以通过取游戏额定距离0.2,除以{{Translation|Inserters}}的额定速度,然后取整来计算它。为了省去计算的麻烦,以下列出供参考的数据表: | |||
'''物品峰值持续时间(刻)''' | |||
{| class="wikitable" | |||
|- | |||
! 热能 !! 电力!! 加长!! 高速 !! 集装 !! 堆叠 | |||
|- | |||
| 5 || 5 || 4 || 1 || 1 || 1 | |||
|- | |||
|} | |||
了解这些数值后,能量消耗很容易计算,且它与{{Translation|Inserters}}的利用率成线性关系。这意味着如果{{Translation|Inserters}}只在一半时间中运行,它也只会消耗一半的能量,但待机功耗是例外的,它在所有情况下都保持不变。 | |||
'''每个搬运周期的能耗(千焦)''' | |||
下列数值与待机功耗相互隔离。这些数值是根据理论推导出来的,并通过实验验证了其准确性,更多信息请参阅这篇[https://forums.factorio.com/viewtopic.php?t=128389 论坛主题]。 | |||
{| class="wikitable" | |||
|- | |||
! 热能 !! 电力!! 加长!! 高速 !! 集装 !! 堆叠 | |||
|- | |||
| 66.9 || 6.65 || 7 || 8.12 || 23.2 || 46.4 | |||
|- | |||
|} | |||
=== 机械臂效率 === | |||
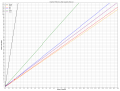
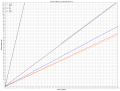
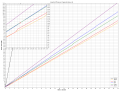
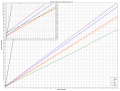
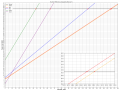
上文中的数据可以直接用于比较{{Translation|Inserters}}的效率。需要注意,无论搬运多少物品,每个搬运周期的能耗都保持不变。这意味着,尽管高级{{Translation|Inserters}}的每周期能耗高于其它{{Translation|Inserters}},但由于其搬运数量更多,因此分摊在每件物品上的能耗更少,因此它们的效率仍然更高。以下列出了一些箱到箱场景下的数据图表,展示了不同{{Translation|Inserters}}在不同运力加成等级下的效率。由于其它{{Translation|Inserters}}保持比例关系(例如相同的搬运数量),这些图表主要侧重于突出{{Translation|Bulk inserter}}和新加入的{{Translation|Stack inserter}}的效率。图表中在它们超越其它{{Translation|Inserters}}的功耗转折点处进行了标记。 | |||
<gallery mode="slideshow"> | |||
File:Inserter Efficiency Graph (No Capacity Bonus).png|无加成 | |||
File:Inserter Efficiency Graph (Capacity Bonus 2).png|加成等级 2 | |||
File:Inserter Efficiency Graph (Capacity Bonus 4).png|加成等级 4 | |||
File:Inserter Efficiency Graph (Capacity Bonus 5) .png|加成等级 5 | |||
File:Inserter Efficiency Graph (Capacity Bonus 6) (Zoomed).png|加成等级 6 | |||
File:Inserter Efficiency Graph (Capacity Bonus 7).png|加成等级 7 | |||
</gallery> | |||
需要注意的是,{{Translation|Inserters}}的实际效率最好以“千焦/个”单位来衡量。之所以没有生成这种版本的图表,是因为它几乎是一条水平线。这是因为对于这种线性的功率消耗,“千焦/个”这种单位只是它的斜率,换而言之,它将是''每搬运周期能耗/搬运数量''。 | |||
此处有一个重要的问题。上述图表假设输入物品(即可搬运物品)是不限量供应的。也就是说,这些图表假设{{Translation|Inserters}}总是以最大搬运数量在工作。然而,在输入物品数量有限的情况下,{{Translation|Inserters}}并不总是这样运行。当{{Translation|Inserters}}完成旋转时,只有在没有可拾取物品时才会待机。只要至少有一个物品,{{Translation|Inserters}}会立即移动它,无视搬运数量少于最大运力导致的效率降低。{{Translation|Stack inserter}}是一个例外,它们会在拾取到最大搬运数量的物品后才会开始旋转,但其它{{Translation|Inserters}}不会。一个输入物品有限的情况是从{{Translation|Assembling machine}}中取出产品。下列图表展示了输入物品有限的情况下{{Translation|Inserters}}的电力消耗情况。 | |||
<gallery mode="slideshow"> | |||
File:Inserter Efficiency Graph (Capacity Bonus 2, Input Minimum 1).png | 加成等级 2,最小输入量 1,以千瓦计 | |||
File:Inserter Efficiency Graph (Capacity Bonus 2, Input Minimum 1, kJ).png | 加成等级 2,最小输入量 1,以千焦/个计 | |||
File:Inserter Efficiency Graph (Capacity Bonus 7, Input Minimum 1).png| 加成等级 7,最小输入量 1,以千瓦计 | |||
File:Inserter Efficiency Graph (Capacity Bonus 7, Input Minimum 1, kJ).png| 加成等级 7,最小输入量 1,以千焦/个计 | |||
</gallery> | |||
下面来解释其行为方式。{{Translation|Inserters}}会根据其最小物品输入量的效用函数将旋转速度提升至最大功率。换而言之,如果最小物品输入量为1,其功耗提升效果将与没有运力加成时一样。一旦达到最大值,{{Translation|Inserters}}将维持最大功率运行,同时逐渐增加拾取物品的平均数量,从而逐渐提升其效率。读者可以在以千焦计的图表中看到这种行为,当效率增加时,会得到一个陡峭下降的曲线。通过观察连续多个机械臂的平均效率改善趋势,最终其数值会收敛至与之前图表相同的基准值,即''每搬运周期能耗/搬运数量''。此处列出的图表涵盖了最常见的使用场景,但实际的最小物品输入量可能有显著差异。例如,制作{{Translation|Transport belt}}时的最小输入量为2,通常情况下,任何配方的最小输入量即为该配方的最低制造数量。当通过传送带供料时,若传送带接近空载或使用信号控制的“[[Glossary/zh#S|寿司带]]”(Sushi)供料系统(即多种物品在一条传送带上循环的供料方式),{{Translation|Inserters}}可能会遇到拾取数量受限的情况。鉴于这些图表存在大量不同的排列组合可能,完整列出所有情况显然不切实际。读者可以使用[https://forums.factorio.com/viewtopic.php?p=670540#p670540 这段代码]自行生成所需的图表。 | |||
由于{{Translation|Burner inserter}}没有待机功耗,其效率只有在极低吞吐量的情况下才能被观察到,故此处使用下列专用图表。对于较早版本的游戏而言,只需要一张没有运力加成的图表就已足够,因为在低吞吐量下{{Translation|Inserters}}不会待机,并且总是默认使用1的搬运数量。但新加入的{{Translation|Stack inserter}}改变了这一情况,因为它只会在拾取到最大搬运数量的物品后才会开始旋转,这意味着它可以始终保持最高效率运行,而其它{{Translation|Inserters}}并非如此。以下图表表明,从一种极端情况到另一种极端情况之间,基本的比例关系并未真正改变,因此这些变化实际上基本无关紧要。 | |||
<gallery mode="slideshow"> | |||
File:Burner Efficiency Graph (No Capacity Bonus).png|无加成 | |||
File:Burner Efficiency Graph (Capacity Bonus 7).png|加成等级 7 | |||
</gallery> | |||
注:{{Translation|Burner inserter}}图表的y轴标注是错误的,实际上的单位应当是千焦(kJ)而非千瓦(kW)。 | |||
=== 传送带差异 === | |||
到目前位置,所有的数据都是基于箱到箱场景,因为它较为简洁和一致。而引入{{Translation|Transport belts}}则会带来新的特殊情况,需要单独考虑。这里是游戏中提供的电力统计图表,供参考。 | |||
[[File:Yellow Inserter Belt-to-Belt Power Signature.png|frameless|center|upright 3]] | |||
图中的{{Translation|Inserter}}正在进行带到带的运输,并且有运力加成。 | |||
图中异常波动的部分是拾取过程。可以看到此处的行为是不规则的,因为{{Translation|Inserters}}不是被动等待物品输入,而是主动寻找它们。这一部分的确切行为仍在研究中,且由于其与{{Translation|Transport belts}}的速度和容量高度相关,因此目前很难给出任何确切的答案来量化实际消耗的功率。理论上来讲,这些行为应该在不同{{Translation|Transport belts}}的速度和容量之间保持一致,可能需要生成一套包含所有可能组合情况的表格作为参考,但目前还没有这样的数据。 | |||
观察卸货过程,可以看到{{Translation|Inserters}}正常移动,但随后出现了一个在箱到箱场景中不存在的凹陷,这是{{Translation|Inserters}}正在{{Translation|Transport belts}}旁等待放下所有物品。在这个等待期内,除了待机功耗外,它不消耗其它电力。一旦所有物品卸下,它就会恢复正常运行。由于{{Translation|Transport belts}}的速度和容量不同造成的不同延迟,可能导致吞吐量和每次搬运的总功耗由于额外的待机功耗发生变化。这也很容易使用表格建模,尽管目前还没有这样的表格。如果读者有兴趣收集和共享此类数据,这会非常有帮助! | |||
目前的实际情况是,只需使用箱到箱的数据,{{Translation|Inserters}}之间的整体关系没有发生显著变化,它们的效率等级也保持不变,尽管分摊在每件物品上的能耗(单位为焦耳)可能会显著增加。这可能对工厂的其它能耗估算产生影响,但对于{{Translation|Inserters}}的选择来说并不构成问题。 | |||
'''重要提示:'''上述效率图表仅适用于从箱子中取出物品,当从传送带上拾取物品时,在提供更精确的专用数据集之前,建议在所有计算中参考初始无运力加成版本的图表。当{{Translation|Inserters}}的搬运数量为1时,箱子与传送带之间的效率关系是相同的。 | |||
'''关于品质:''' 更高{{L|Quality}}的{{Translation|Inserters}}会随着品质的提升而获得线性的速度提升,并相应地增加电力消耗。这意味着{{Translation|Inserters}}的品质等级对其能量效率没有影响。 | |||
''<small>本页面需要更多关于从传送带拾取物品的{{Translation|Inserters}}相关数据,以及关于{{Translation|Burner inserter}}能量消耗的更详细数据。诚挚欢迎读者贡献更多相关数据。</small>'' | |||
== 参见 == | == 参见 == | ||
* | * {{L|Electric system}} | ||
* | * {{L|Belt transport system}} | ||
* {{L|Inserter capacity bonus (research)}}:使机械臂每次能搬运超过1个物品。 | |||
{{C|Inserters}} | {{C|Logistics/zh{{!}}#}} | ||
{{C|Inserters/zh{{!}}#}} | |||
Latest revision as of 05:52, 1 March 2026
关于常见的黄色电力机械臂,请参见电力机械臂。
机械臂是用于在短距离上移动物品的一种设备。在放置后,它们的方向是固定的。机械臂能够将其后方的物品移动到前方并放置,这使得它们可以将物品从一条传送带移动到另一条传送带,也可以从机器或容器中抓取物品,或将物品置入其中。
机械臂类型
| 仅以燃料为动力的机械臂,速度最慢。 | |
| 标准的电力机械臂。 | |
| 可以在更远的距离上移动物品。 | |
| 比电力机械臂快得多。 | |
| 和高速机械臂一样快,但可以同时移动更多物品。 | |
| 和集装机械臂一样快,但可以在传送带上输出物品组。 |
机制
机械臂可以:
- 从地面、传送带、或任何具有存储空间的物体中(例如箱子、冶炼炉、组装机或载具等)拾取物品。
- 将物品放置在地面上、传送带上、或任何具有存储空间的物体中。
- 当供电不足时,会以较慢的速度运行。(但热能机械臂在缺乏燃料时会停止工作。)
- 每次尽量拾取最大搬运数量的物品,只要不等待太长时间。
- 拾取物品并将它们投入太空或岩浆中,永久性地将它们销毁。这在处理不需要的物品时很有用。
机械臂不能:
- 拾取无法放入相邻实体的物品。
- 当相邻实体是虚影时,不会拾取任何物品。
- 拾取物品以放入库存已满的实体中。(即使并非所有物品都能放入实体,机械臂也会拾取最大搬运数量的物品)
- 同时将多个物品放置在同一个地格上。
- 将物品放入不能储存它们的实体,例如由于筛选或容量限制。
- 向行驶中,或自动驾驶但未停靠车站(例如在信号处等待)的列车所属的货运车厢/内燃机车填充货物/燃料。(此时货运车厢会显示关闭状态的动画)
- 将锅炉、核反应堆、生产建筑,冶炼炉和炮塔的存储栏填满(详见下文)。
如果两台或更多机械臂从同一地格拾取物品,能最快拾取物品的机械臂将会先拾起物品。速度更快或从传送带内侧拾取物品的机械臂在拾取时会有更高的优先级。
填充限制
根据机械臂移动物品的位置,它并不总是会填满目标的存储空间。这允许其他机械臂从同一传送带拾取物品。例如,如果一座锅炉里面有5个或更多燃料,机械臂将不会填充额外的燃料,其他燃料可以沿传送带继续向前移动。当燃料数量低于5个时,机械臂将继续填充燃料,直到5个物品的上限。
| 实体 | 物品类型 | 自动填充限制 |
|---|---|---|
| 锅炉、热能机械臂、冶炼炉和核反应堆 | 燃料 | 5 |
| 机枪炮塔 | 弹匣 | 10 |
| 重炮炮塔 | 重炮炮弹 | 5 |
| 组装机、冶炼炉、离心机、化工厂和炼油厂 | 配方所需原料 | 除了用于1次制造的原料,还要加上在1次完整的机械臂搬运过程中可以完成的制造所需的原料;但至少是2次制造所需的原料,最多是100次制造所需的原料。 |
| 研究中心 | 科技包 | 除了用于1单位研究进度的科技包,还要加上在1次完整的机械臂搬运过程中可以完成的研究进度所需的科技包;但至少是2单位研究进度所需的科技包,最多是100单位研究进度所需的科技包。 |
由于机械臂的搬运数量可以通过研究科技:机械臂运力加成而超过1,因此可能由于机械臂拾取比所需数量更多的物品而导致目标库存溢出。如果使用多台机械臂向同一建筑填充物品,也可能导致库存溢出。
机械臂与传送带
传送带有两条线路(即左右两侧)用于运输物品。机械臂仅把物品放置在传送带一侧。当机械臂与传送带垂直放置时,物品会放置在传送带的较远一侧,当机械臂与传送带平行放置时,物品会放置在机械臂前方的右侧。
-
 机械臂将物品放置在传送带远测。如果传送带与机械臂的运行方向相同,则物品会被放置在传送带的右侧线路上。对于弯道传送带,机械臂总是将物品放置在传送带远测。
机械臂将物品放置在传送带远测。如果传送带与机械臂的运行方向相同,则物品会被放置在传送带的右侧线路上。对于弯道传送带,机械臂总是将物品放置在传送带远测。 -
 当机械臂与传送带垂直放置时,机械臂会优先从传送带近侧拾取物品。如果近侧路线是空的,则机械臂会从远侧拾取物品。如果机械臂与传送带平行放置,机械臂会优先从传送带左侧线路拾取物品,如果左侧线路是空的,则机械臂会从右侧线路拾取物品。
当机械臂与传送带垂直放置时,机械臂会优先从传送带近侧拾取物品。如果近侧路线是空的,则机械臂会从远侧拾取物品。如果机械臂与传送带平行放置,机械臂会优先从传送带左侧线路拾取物品,如果左侧线路是空的,则机械臂会从右侧线路拾取物品。


潜在问题
在以下情况中,机械臂可能无法拾取物品:
- 从速度很快的传送带上,因为物品移动得太快。
- 从地下传送带的入口或出口(因为它们可以拾取的时间较短)。
- 从传送带弯道处,如果物品位于弯道内侧。
机械臂速度

| 类型 | 旋转速度(转/刻) 臂展速度(格/刻) |
每游戏秒 旋转圈数 |
旋转一圈 所需秒数 |
旋转一圈 所需刻数 |
|---|---|---|---|---|
| 0.013 0.035 |
~0.7895 | ~1.267 | 76 | |
| 0.014 0.035 |
~0.857 | ~1.167 | 70 | |
| 0.02 0.05 |
1.2 | 0.833 | 50 | |
| 0.04 0.1 |
2.5 | 0.4 | 24 |
备注:每刻速度直接来源于异星工厂Github数据库,其它值已在游戏中经过实际验证。误差是由于游戏运行时的取整错误导致的,因此在速度计算时,使用经验值会更加准确。
旋转速度
换算:2π 弧度 = 100% 圆周运动 = 1 转(即完整旋转一圈)。
注:
- 机械臂并不总是需要转完一圈。当从传送带上拾取物品时,从近侧线路上抓取物品会稍微快一点。
- 如果机械臂的旋转速度使其完整转完一圈所用的刻数为奇数,则该机械臂完整旋转一圈的实际刻数会被取为下一个最小的偶数。这是因为机械臂需要旋转两圈半来拾取和放置一个物品,这会消耗两倍刻数的时间,因此完整旋转一圈的刻数始终是偶数。例如:高速机械臂的旋转速度为864°/秒或0.04转/刻,即完整旋转一圈理论上需要25刻,但机械臂不能在12.5刻内旋转半圈(因为游戏内的最小时间单位为1刻),所以实际上每完整旋转一圈需要2×12=24刻。
臂展速度
臂展速度通常是不可见的(只有当与其他机械臂比较时才可见),但当从传送带的近侧或远侧拾取物品时,存在可测量的速度差异。此外,一些模组可以改变机械臂的拾取和放置位置,这使得此数据更加具有实用意义。
机械臂吞吐量
箱到箱
| 类型 | 每秒周期数 | 不同运力加成等级下的运输量 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 无加成 | 2 级 | 7 级 | 传送带容量 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
(1) |
|
(2) |
|
(3) |
|
(4) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
(1) |
|
(2) |
|
(3) |
|
(4) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
(1) |
|
(2) |
|
(3) |
|
(4) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
(1) |
|
(2) |
|
(3) |
|
(4) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
(2) |
|
(4) |
|
(12) |
|
(12) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
(6) |
|
(8) |
|
(16) |
|
(16) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
备注:
- 实验基于2.0.26版本,原始数据可在此文档中查阅。机械臂可在1刻内将全部持有物品放入箱子中,因此大部分时间都花费在机械臂的转动上;
- 周期数一列中括号外数据表示每秒可完成的搬运周期数(即从拾取物品到放下物品的完整过程),括号内数据表示完成一个搬运周期所需的时间(以刻计);
- 运输量各列中不带括号的数据表示每秒可搬运的物品数量,带括号单列的数据表示单次可搬运的最大物品数量。
箱到带
从箱子到传送带的吞吐量取决于传送带的满载程度。如果传送带上的物品是紧密排列的(即完全压缩),机械臂就不会在传送带上放置物品——它会等待空隙出现。然而,如果空隙比物品窄,则传送带上游的物品会停下,为塞入其中的物品腾出空间。不过,传送带的方向比起机械臂而言并不重要。
测试条件为使用机械臂将物品移至空的传送带上,数据包含4个不同的机械臂运力加成等级下的运输量。
备注:
- 实验数据基于2.0版本;
- 各列中不带括号的数据表示每秒可搬运的物品数量,带括号单列的数据表示单次可搬运的最大物品数量。
| 类型 | 不同运力加成等级下的运输量 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 无加成 | 2 级 | 7 级 | 传送带容量 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
(1) |
|
|
|
|
(2) |
|
|
|
|
(3) |
|
|
|
|
(4) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
(1) |
|
|
|
|
(2) |
|
|
|
|
(3) |
|
|
|
|
(4) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
(1) |
|
|
|
|
(2) |
|
|
|
|
(3) |
|
|
|
|
(4) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
(1) |
|
|
|
|
(2) |
|
|
|
|
(3) |
|
|
|
|
(4) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
(2) |
|
|
|
|
(4) |
|
|
|
|
(12) |
|
|
|
|
(12) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
(6) |
|
|
|
|
(8) |
|
|
|
|
(16) |
|
|
|
|
(16) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
箱到分流器
当机械臂将物品垂直送入分流器的一侧,它总是被视为置于分流器的输入端,这使得分流器能将一半数量的物品移动到另一条传送带(假设分流器的筛选/优先设置允许,且两条传送带上都有可用空间),从而使机械臂能更快地搬运物品。机械臂运力加成等级为 7 的集装机械臂可以16.0 件/秒的速度传输物品,而不是通常的 14.4 件/秒。
-
 通过放置到分流器的一侧,升满科技的集装机械臂可以填充极速传送带的 71%,而不是通常的 64%。(动图基于1.1版本)
通过放置到分流器的一侧,升满科技的集装机械臂可以填充极速传送带的 71%,而不是通常的 64%。(动图基于1.1版本) -
 1.1 版本中,如果将其中一台接入分流器,三台集装机械臂即可填满一条极速传送带。2.0 版本中,如果其中两台接入分流器,三台集装机械臂即可填满一条极速传送带。(动图基于1.1版本)
1.1 版本中,如果将其中一台接入分流器,三台集装机械臂即可填满一条极速传送带。2.0 版本中,如果其中两台接入分流器,三台集装机械臂即可填满一条极速传送带。(动图基于1.1版本)


带到箱(垂直)
备注:以下内容基于1.1版本的实验数据。1.1版本的大部分实验数据都是下面的信号网络蓝图采集的,用于测量机械臂转动过程之间的精确时间差。本页上的大部分数据(特别是带到箱的数据)在很大程度上依赖于进行测量所设置的条件。如果读者的设置与本页中的测试不同,可以使用以下蓝图自行进行测量。
当从传送带上拾取物品时,除了传送带的填充程度之外,还有很多其它因素起作用:
- 物品移动的速度(即它们是否在传送带上排队或以传送带速度移动)。
- 传送带是否垂直于机械臂或迎面放置。
- 物品是否在垂直传送带的近或远侧线路上。
- 传送带是否转弯,以及物品在弯道的内侧还是外侧。
- 是否是地下传送带的入口或出口。这缩短了机械臂拾取物品需要的时间。
- 机械臂和传送带上的物品间的各种复杂的时机因素,因为游戏模拟了机械臂对每个物品的锁定。
下面使用的测试设置是一台机械臂从垂直传送带上拾取物品,且物品仅在传送带的远端线路上。传送带完全压缩,计时既适用于全速移动的物品,也适用于正在尽量排队等待的物品。数据为三种不同的机械臂运力加成等级下的运输数量。
| 类型 | 不同运力加成等级下的运输量 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 无加成 | 2 级 | 7 级 | |||||||||||||
| 移动中物品 | 排队中物品 | 移动中物品 | 排队中物品 | 移动中物品 | 排队中物品 | ||||||||||
| 0.60 | 0.65 | 0.50 | 0.64 | (1) | 1.11 | 1.20 | 1.13 | 1.26 | (2) | 1.61 | 1.61 | 1.65 | 1.71 / 1.73 / 1.86 * |
(3) | |
| 0.94 | 0.94 | 0.94 | 0.88 | (1) | 1.67 | 1.67 | 1.50 | 1.74 | (2) | 2.50 | 2.25 | 2.33 | 2.37 / 2.37 / 2.54 * |
(3) | |
| 1.18 | 1.18 | 1.25 | 1.20 | (1) | 2.20 | 2.31 | 2.40 | 2.40 | (2) | 3.21 | 3.21 | 3.46 | 3.40 | (3) | |
| 2.50 | 2.31 | 2.50 | 2.50 | (1) | 4.50 | 4.29 | 5.00 | 4.80 | (2) | 6.43 | 6.00 | 6.43 | 6.43 | (3) | |
| 4.50 | 4.29 | 5.00 | 4.80 | (2) | 7.50 | 7.50 | 8.00 | 7.50 / 8.57 / 8.28 * |
(4) | 7.50 | 11.25 | 15.00 | 7.50 / 13.09 / 15.32 * |
(12) | |
备注:
- 带*的三个数据分别对应基础/高速/极速传送带的运量;
- “移动中物品”表示物品正常随传送带移动,“排队中物品”表示物品在传送带上停止,等待前方物品移动;
- 不带括号的数据表示每秒可搬运的物品数量,带括号单列的数据表示每次可搬运的最大物品数量。
由于涉及更多因素,这些测量比箱到带模式更加复杂。
- 粗体字的单元格显示了在每个加成等级下,每种传送带对应于每种机械臂的最高吞吐量。更快的传送带速度意味着机械臂需要更努力地拾取快速移动的物品。这种效果在较慢的机械臂和较小的搬运数量下更加明显。
- 当物品排队时,传送带类型基本上无关紧要,因此这种情况只给出一列数据。例外的是集装机械臂——对于基础传送带设置了4以上的运力限制,此外高速和极速传送带间的差异也是显著的。
带到箱(面对机械臂)
备注: 实验数据基于1.1版本。
当从面对机械臂的传送带上拾取物品时,不同设置之间存在多个细微差异。下列吞吐量测试使用极速传送带和集装机械臂,且将科技:机械臂运力加成升级到最高等级。下图中的每个设置显示机械臂每转消耗的时间(刻)和机械臂每秒移动的物品数量(个)。这些测量在所有测试方向上都是一致的。
图中:t/c = 刻/转,i/s = 个/秒

到岩浆/太空
在太空时代中,机械臂可将物品移动到祝融星的岩浆中,或太空平台上的太空中。然而,这种操作的速度并不像移入容器(如箱子)那样快。
当物品移动到岩浆/太空时,每刻会从机械臂持有的物品中移除一个。因此,一个持有16个物品的堆叠机械臂需要16刻才能将其持有的物品全部移动到岩浆/太空。相比之下,在移入容器时,机械臂持有的全部物品会在1刻内被移入容器中。
能量消耗
机械臂的功耗由多个因素决定。
首先,像大多数机器一样,所有机械臂(除了热能机械臂以外)都有待机功耗,这是一个固定功耗。只要机械臂接入电网,无论是否工作,都会持续消耗电能。
机械臂也有与运动相关的两种功耗。这些功耗分别用于旋转运动和伸长/收缩运动(即臂展运动),且会累积。
最后,机械臂在拾取和放下物品时会表现出功率峰值,可以称为“物品峰值”,因为这通常会在机械臂与物品交互后直接观察到。这是因为在拾取/放下物品后,机械臂会开始伸长/收缩0.2单位(此距离由Lua源代码给出)。由于游戏中与线性运动相关的功耗比旋转运动高得多,此时机械臂的能耗会急剧增加。

从电力消耗图表可见,在线性运动期间,电力机械臂的电力消耗是显著增加的。
热能机械臂虽然不使用电力,但它们与其它机械臂具有相同的能量消耗特性(除了待机功耗)。在获得燃料时,它们会补充自身的热能储备(类似于某种内部电池),并以与其它机械臂使用电网电力的相同方式使用热能,包括物品峰值。除了待机功耗外,热能机械臂的功能与其它机械臂相同,但拆除热能机械臂会导致其内部能量储备清零。
能量消耗

需要注意的是,由于取整误差,在进行计算时不能直接使用游戏提供的数据,必须结合理论和经验方法来确保准确性。更多信息可以查看这篇论坛主题。
游戏根据机械臂的硬编码修正系数计算其实际功率:
机械臂功率修正(千焦)
这些数值是从源代码中衍生而来。
| 热能 | 电力 | 加长 | 高速 | 集装 | 堆叠 |
|---|---|---|---|---|---|
| 50 | 5 | 5 | 7 | 20 | 40 |
游戏使用这些数值的方式是取以刻为单位的游戏运行速度(详见上文),然后代入以下公式来推导功率:
速度 × 功率修正系数 × 每秒刻数
应用该公式可以推导出以下数值:
旋转运动的功耗(千瓦)
| 热能 | 电力 | 加长 | 高速 | 集装 | 堆叠 |
|---|---|---|---|---|---|
| 39 | 4.2 | 6 | 16.8 | 48 | 96 |
线性运动的功耗(千瓦)
| 热能 | 电力 | 加长 | 高速 | 集装 | 堆叠 |
|---|---|---|---|---|---|
| 105 | 10.5 | 15 | 42 | 120 | 240 |
将上述两个值相加,再加上待机功耗,即可得到最大功率值。需要注意的是,虽然能量消耗的持续时间会受到游戏中取整误差的影响,比如每次旋转的时间等,但实际功率不会受到这些误差的影响。机械臂的旋转速度略快于游戏代码并不意味着其功率也会略微升高,它仍然维持相同的功率。
旋转功耗机械臂旋转的整个期间都会存在,但臂展功耗仅在与物品交互时短暂出现,导致物品峰值的出现。通过计算两者的持续时间,读者可以精确地计算初在任何给定情况下机械臂使用多少焦耳的能量。与旋转速度一样,物品峰值的持续时间也受到游戏取整误差的影响。可以通过取游戏额定距离0.2,除以机械臂的额定速度,然后取整来计算它。为了省去计算的麻烦,以下列出供参考的数据表:
物品峰值持续时间(刻)
| 热能 | 电力 | 加长 | 高速 | 集装 | 堆叠 |
|---|---|---|---|---|---|
| 5 | 5 | 4 | 1 | 1 | 1 |
了解这些数值后,能量消耗很容易计算,且它与机械臂的利用率成线性关系。这意味着如果机械臂只在一半时间中运行,它也只会消耗一半的能量,但待机功耗是例外的,它在所有情况下都保持不变。
每个搬运周期的能耗(千焦)
下列数值与待机功耗相互隔离。这些数值是根据理论推导出来的,并通过实验验证了其准确性,更多信息请参阅这篇论坛主题。
| 热能 | 电力 | 加长 | 高速 | 集装 | 堆叠 |
|---|---|---|---|---|---|
| 66.9 | 6.65 | 7 | 8.12 | 23.2 | 46.4 |
机械臂效率
上文中的数据可以直接用于比较机械臂的效率。需要注意,无论搬运多少物品,每个搬运周期的能耗都保持不变。这意味着,尽管高级机械臂的每周期能耗高于其它机械臂,但由于其搬运数量更多,因此分摊在每件物品上的能耗更少,因此它们的效率仍然更高。以下列出了一些箱到箱场景下的数据图表,展示了不同机械臂在不同运力加成等级下的效率。由于其它机械臂保持比例关系(例如相同的搬运数量),这些图表主要侧重于突出集装机械臂和新加入的堆叠机械臂的效率。图表中在它们超越其它机械臂的功耗转折点处进行了标记。
-
 无加成
无加成 -
 加成等级 2
加成等级 2 -
 加成等级 4
加成等级 4 -
 加成等级 5
加成等级 5 -
 加成等级 6
加成等级 6 -
 加成等级 7
加成等级 7
.png)
.png)
.png)
_.png)
_(Zoomed).png)
.png)
需要注意的是,机械臂的实际效率最好以“千焦/个”单位来衡量。之所以没有生成这种版本的图表,是因为它几乎是一条水平线。这是因为对于这种线性的功率消耗,“千焦/个”这种单位只是它的斜率,换而言之,它将是每搬运周期能耗/搬运数量。
此处有一个重要的问题。上述图表假设输入物品(即可搬运物品)是不限量供应的。也就是说,这些图表假设机械臂总是以最大搬运数量在工作。然而,在输入物品数量有限的情况下,机械臂并不总是这样运行。当机械臂完成旋转时,只有在没有可拾取物品时才会待机。只要至少有一个物品,机械臂会立即移动它,无视搬运数量少于最大运力导致的效率降低。堆叠机械臂是一个例外,它们会在拾取到最大搬运数量的物品后才会开始旋转,但其它机械臂不会。一个输入物品有限的情况是从组装机中取出产品。下列图表展示了输入物品有限的情况下机械臂的电力消耗情况。
-
 加成等级 2,最小输入量 1,以千瓦计
加成等级 2,最小输入量 1,以千瓦计 -
 加成等级 2,最小输入量 1,以千焦/个计
加成等级 2,最小输入量 1,以千焦/个计 -
 加成等级 7,最小输入量 1,以千瓦计
加成等级 7,最小输入量 1,以千瓦计 -
 加成等级 7,最小输入量 1,以千焦/个计
加成等级 7,最小输入量 1,以千焦/个计
.png)
.png)
.png)
.png)
下面来解释其行为方式。机械臂会根据其最小物品输入量的效用函数将旋转速度提升至最大功率。换而言之,如果最小物品输入量为1,其功耗提升效果将与没有运力加成时一样。一旦达到最大值,机械臂将维持最大功率运行,同时逐渐增加拾取物品的平均数量,从而逐渐提升其效率。读者可以在以千焦计的图表中看到这种行为,当效率增加时,会得到一个陡峭下降的曲线。通过观察连续多个机械臂的平均效率改善趋势,最终其数值会收敛至与之前图表相同的基准值,即每搬运周期能耗/搬运数量。此处列出的图表涵盖了最常见的使用场景,但实际的最小物品输入量可能有显著差异。例如,制作基础传送带时的最小输入量为2,通常情况下,任何配方的最小输入量即为该配方的最低制造数量。当通过传送带供料时,若传送带接近空载或使用信号控制的“寿司带”(Sushi)供料系统(即多种物品在一条传送带上循环的供料方式),机械臂可能会遇到拾取数量受限的情况。鉴于这些图表存在大量不同的排列组合可能,完整列出所有情况显然不切实际。读者可以使用这段代码自行生成所需的图表。
由于热能机械臂没有待机功耗,其效率只有在极低吞吐量的情况下才能被观察到,故此处使用下列专用图表。对于较早版本的游戏而言,只需要一张没有运力加成的图表就已足够,因为在低吞吐量下机械臂不会待机,并且总是默认使用1的搬运数量。但新加入的堆叠机械臂改变了这一情况,因为它只会在拾取到最大搬运数量的物品后才会开始旋转,这意味着它可以始终保持最高效率运行,而其它机械臂并非如此。以下图表表明,从一种极端情况到另一种极端情况之间,基本的比例关系并未真正改变,因此这些变化实际上基本无关紧要。
-
 无加成
无加成 -
 加成等级 7
加成等级 7
.png)
.png)
注:热能机械臂图表的y轴标注是错误的,实际上的单位应当是千焦(kJ)而非千瓦(kW)。
传送带差异
到目前位置,所有的数据都是基于箱到箱场景,因为它较为简洁和一致。而引入传送带则会带来新的特殊情况,需要单独考虑。这里是游戏中提供的电力统计图表,供参考。

图中的电力机械臂正在进行带到带的运输,并且有运力加成。
图中异常波动的部分是拾取过程。可以看到此处的行为是不规则的,因为机械臂不是被动等待物品输入,而是主动寻找它们。这一部分的确切行为仍在研究中,且由于其与传送带的速度和容量高度相关,因此目前很难给出任何确切的答案来量化实际消耗的功率。理论上来讲,这些行为应该在不同传送带的速度和容量之间保持一致,可能需要生成一套包含所有可能组合情况的表格作为参考,但目前还没有这样的数据。
观察卸货过程,可以看到机械臂正常移动,但随后出现了一个在箱到箱场景中不存在的凹陷,这是机械臂正在传送带旁等待放下所有物品。在这个等待期内,除了待机功耗外,它不消耗其它电力。一旦所有物品卸下,它就会恢复正常运行。由于传送带的速度和容量不同造成的不同延迟,可能导致吞吐量和每次搬运的总功耗由于额外的待机功耗发生变化。这也很容易使用表格建模,尽管目前还没有这样的表格。如果读者有兴趣收集和共享此类数据,这会非常有帮助!
目前的实际情况是,只需使用箱到箱的数据,机械臂之间的整体关系没有发生显著变化,它们的效率等级也保持不变,尽管分摊在每件物品上的能耗(单位为焦耳)可能会显著增加。这可能对工厂的其它能耗估算产生影响,但对于机械臂的选择来说并不构成问题。
重要提示:上述效率图表仅适用于从箱子中取出物品,当从传送带上拾取物品时,在提供更精确的专用数据集之前,建议在所有计算中参考初始无运力加成版本的图表。当机械臂的搬运数量为1时,箱子与传送带之间的效率关系是相同的。
关于品质: 更高品质的机械臂会随着品质的提升而获得线性的速度提升,并相应地增加电力消耗。这意味着机械臂的品质等级对其能量效率没有影响。
本页面需要更多关于从传送带拾取物品的机械臂相关数据,以及关于热能机械臂能量消耗的更详细数据。诚挚欢迎读者贡献更多相关数据。
参见
- 电力系统
- 传送带运输系统
- 科技:机械臂运力加成:使机械臂每次能搬运超过1个物品。